NICT、ミリ波IoT搭載サービスロボットによる協働型見廻りシステムを開発
- 2021/6/10
- フィールド
- TransferJet X, 協働型見廻りシステム, 自律移動サービスロボット

情報通信研究機構(NICT)ソーシャルICTシステム研究室は9日、ソニーセミコンダクタソリューションズと共同で、60GHz帯のミリ波を用いる次世代TransferJet 通信技術(TransferJet X)を搭載した自律移動サービスロボットによる協働型見廻りシステムを開発したと発表した。
4Kカメラを搭載した複数の自律移動サービスロボットに対して無線で見廻りを依頼すると、見廻り場所近くにいるロボットが移動して撮影を行い、その後、撮影データは依頼者の元までロボット自身が運搬し、再生装置にTransferJet Xで無線伝送、自動再生される。実証実験では、86.8m離れた先の見廻り場所の撮影データ(約10GB)を依頼者の元におよそ163秒(移動時間129秒、伝送時間34秒)で届けられることが確認できた。これは、データ転送速度に換算すると、514Mbpsに相当する。
本システムは、広帯域通信インフラの新規敷設が難しいエリアや人の立入りが困難なエリアにおいて高解像度(4K)映像での情報収集・配信システムとしての活用が期待できるほか、ニューノーマル時代におけるオフィス環境等の自動見廻りや注意喚起を非接触に行うサービス等への展開が期待されるという。
今回開発した自律移動サービスロボット協働型見廻りシステムは、広帯域通信インフラの新規敷設が困難な場所や電波の届かないエリアなどにおける高解像度カメラを用いた撮影データの実質的な無線転送手段として利用可能。災害や老朽化に伴う構造物のひび割れ等の検出を目的とした無人監視サービスや、ニューノーマル時代に求められる密なオフィス環境等の自動見廻りと注意喚起を非接触に行うサービスへの応用なども期待される。今後は、実際のオフィス・ホテル・病院等のビル内や駅・商業施設等の構内といった実環境における実用性検証を、想定されるサービス提供者やビル・駅管理等に関わる企業様の協力を得て実施する予定だという。
関連URL
関連記事




注目記事
-
2026-3-11
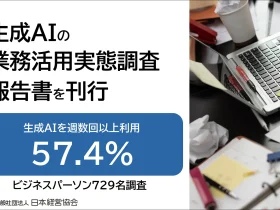
日本経営協会、生成AIの業務活用2位は「文章校正」1位は?
日本経営協会は、2025年9月10日~9月18日の期間、企業・団体に勤務するビジネスパーソン729名… -

2026-3-11
アイスマイリー、物流・交通・運輸向けAIサービスカオスマップ公開
AIポータルメディア「AIsmiley」を運営するアイスマイリーは10日、現場の課題に応じた最適解を… -

2024-9-19
小学校の授業における生成AIの活用と文科省ガイドライン
小学校の授業における生成AIの活用は、教育の質を向上させる新たな可能性を秘めている。生成AIを活用す… -

2024-8-19
生成AIの種類(ChatGPT, Gemini, Copilot)・特徴と使い方
生成AI(生成型人工知能)は、テキスト、画像、音声などのコンテンツを自動で生成する技術。日本国内でも… -
2023-8-21
総社市スマホ市役所、生成AIを用いた対話応答型サービスを開始
岡山県総社市とBot Expressは18日、7月に開設した総社市スマホ市役所で、生成AIを用いた対…