ザクティは9日、国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO)の「ロボットによる社会変革推進に向けたロボット・AI部事業の周辺技術・関連課題に係る先導調査研究」事業として、悪環境でも人物検出が可能な自動走行ロボット・無人搬送車向け、人物検出用の2眼遠赤外線カメラセンサの試作開発を行い、自動走行ロボットに搭載して実証実験を行ったと発表した。
自動走行ロボットの活用は物流のラストワンマイルを担うことから、物流業界のDX・人手不足解消に大きく期待されており、同社では映像センシング技術をデジタル映像ソリューションのキーテクノロジの一つとして位置付けて研究開発に取り組んでいる。
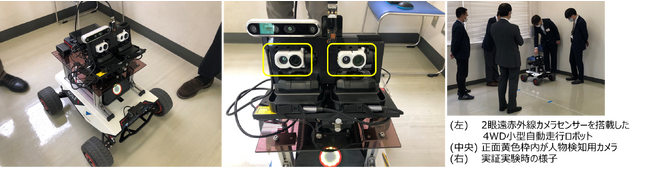
本実証実験では、ブルーイノベーションの協力を得て、異機種・複数のロボットやセンサを遠隔で制御・統合管理する同社のベースプラットフォーム「Blue Earth Platform」(BEP)と接続された4WD小型自動走行ロボットに本センサを搭載・連携させ、自動走行ロボットの自動走行中に本センサが人物を検出するとBEPを通して自動走行ロボットを停止させるという一連の動きを検証し、悪環境でも高精度に人物検出が可能なロバスト性と安全な自動走行の可能性を確認した。
 今後も自動走行ロボットの普及に向け引き続き、特徴的な映像センシングソリューションの提供に取り組んでいくという。
今後も自動走行ロボットの普及に向け引き続き、特徴的な映像センシングソリューションの提供に取り組んでいくという。
今回の研究開発は、自動走行ロボットの活用によって物流業界の抱える人手不足問題の解決を目指すもので、既存のセンサでは難しいとされていた条件下での自動走行を実現し、より安全な自動走行ロボット走行に寄与するもの。既存の可視カメラセンサやLiDAR(Light Detection And Ranging)では人物の検出が困難な夜間や霧などの悪環境において、本センサを用いることで人物を検出し、さらに人物までの距離も算出することが可能であることを確認した。
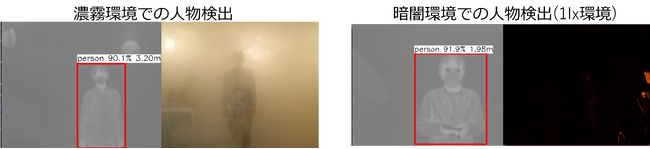 本センサを自動走行ロボットに搭載することで、従来は人物検出が難しいとされていた悪環境下の人物検出精度を向上させ、より安全な自動走行を実現できる。
本センサを自動走行ロボットに搭載することで、従来は人物検出が難しいとされていた悪環境下の人物検出精度を向上させ、より安全な自動走行を実現できる。
関連URL
「ロボットによる社会変革推進に向けたロボット・AI 部事業の周辺技術・関連課題に係る先導調査研究」(NEDOの公募事業)について
ブルーイノベーション
ザクティ
関連記事





注目記事
-
2026-3-11
日本経営協会、生成AIの業務活用2位は「文章校正」1位は?
日本経営協会は、2025年9月10日~9月18日の期間、企業・団体に勤務するビジネスパーソン729名… -

2026-3-11
アイスマイリー、物流・交通・運輸向けAIサービスカオスマップ公開
AIポータルメディア「AIsmiley」を運営するアイスマイリーは10日、現場の課題に応じた最適解を… -

2024-9-19
小学校の授業における生成AIの活用と文科省ガイドライン
小学校の授業における生成AIの活用は、教育の質を向上させる新たな可能性を秘めている。生成AIを活用す… -

2024-8-19
生成AIの種類(ChatGPT, Gemini, Copilot)・特徴と使い方
生成AI(生成型人工知能)は、テキスト、画像、音声などのコンテンツを自動で生成する技術。日本国内でも… -
2023-8-21
総社市スマホ市役所、生成AIを用いた対話応答型サービスを開始
岡山県総社市とBot Expressは18日、7月に開設した総社市スマホ市役所で、生成AIを用いた対…