アトラックラボ、AI使い人に追従する収穫サポートロボットを開発
- 2020/11/4
- フィールド
- ロボット, 人追従型収穫物搬送ロボット車, 農業

アトラックラボは4日、佐賀大学、銀座農園と共同で、機械学習を活用した人認識による人追従型収穫物搬送ロボット車を開発したと発表した。
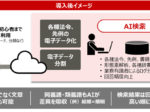
搬送ロボット車に装着したカメラ映像をもとに、機械学習により人の大きさを検知し、カメラと人との距離を算出、距離に応じて搬送ロボット車は人追従走行と停止を判断して自律追従する。
搬送ロボット車を追従させたい人は、簡単なビブスを着用するだけであり、特殊なマーカーなどを身につける必要はない。また葉などが茂り、カメラが人の足元まで映らない場合も、適切に人の大きさが認識できるように機械学習を行ったという。
カメラ映像をもとに機械学習により人の大きさを検知し、距離算出と人追従走行と停止を行う制御アルゴリズムは、佐賀大学教育研究院自然科学域理工学系の佐藤和也教授が開発、移動ロボット車に実装した。アトラックラボと銀座農園は、搬送ロボット車の開発やシステム設計などを担当。
従来、搬送ロボット車が人との距離に応じて人追従走行をする場合は、LiDARやステレオカメラが必要であった。この方式では、安価な単眼カメラなどが使用できるため、 コスト的に大きなアドバンテージがある。
佐賀県農業試験研究センターの協力のもと、同センター三瀬分場の実験圃場において、ブロッコリー収穫における搬送を模擬して実験が行われ、カゴに15kgの重りを乗せた状態でも搬送ロボット車は安定して人追従走行と停止することが実証された。
今後コストの制限が大きい農業分野などに展開するとともに、ライン工場内での治具搬送、倉庫内での搬送補助などに応用していくという。
関連URL
関連記事




注目記事
-
2026-3-11
日本経営協会、生成AIの業務活用2位は「文章校正」1位は?
日本経営協会は、2025年9月10日~9月18日の期間、企業・団体に勤務するビジネスパーソン729名… -

2026-3-11
アイスマイリー、物流・交通・運輸向けAIサービスカオスマップ公開
AIポータルメディア「AIsmiley」を運営するアイスマイリーは10日、現場の課題に応じた最適解を… -

2024-9-19
小学校の授業における生成AIの活用と文科省ガイドライン
小学校の授業における生成AIの活用は、教育の質を向上させる新たな可能性を秘めている。生成AIを活用す… -

2024-8-19
生成AIの種類(ChatGPT, Gemini, Copilot)・特徴と使い方
生成AI(生成型人工知能)は、テキスト、画像、音声などのコンテンツを自動で生成する技術。日本国内でも… -
2023-8-21
総社市スマホ市役所、生成AIを用いた対話応答型サービスを開始
岡山県総社市とBot Expressは18日、7月に開設した総社市スマホ市役所で、生成AIを用いた対…