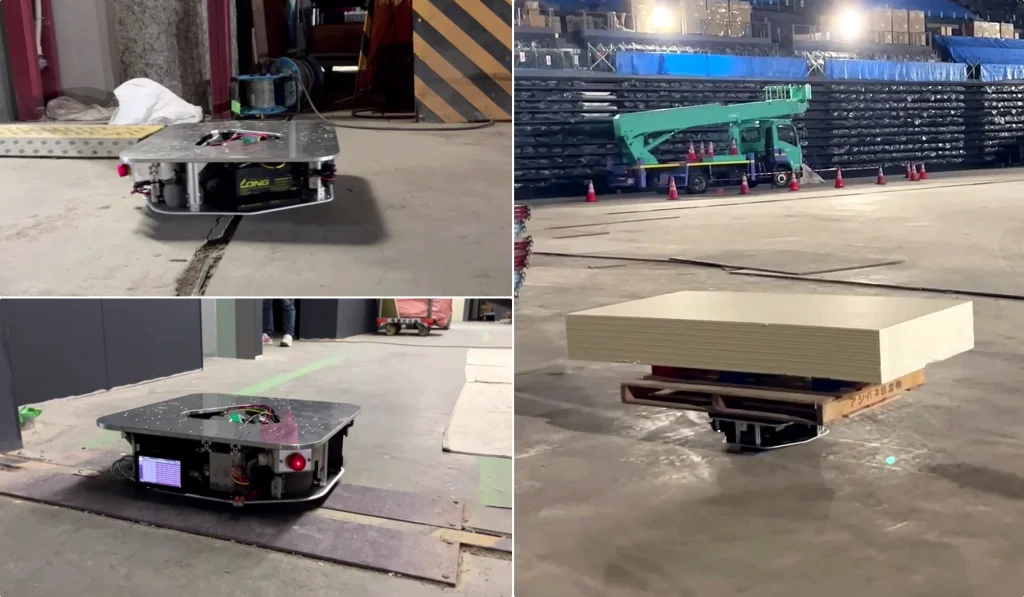
全方向移動ロボットの活用により、ロボットと人、ロボット同士の協調搬送・作業の実現を目指すTriOrb(トライオーブ)と戸田建設は14日、建設業界における人手不足の課題解決や重労働作業のロボットへの代替、生産性の向上を目的に、全方向移動ロボット(TriOrb BASE)を用いた資材搬送装置の開発を目的とした共同研究を開始したと発表した。
 今回、建設業界における人手不足の課題解決や重労働作業のロボットへ代替、生産性向上目的に、全方向移動ロボット(TriOrb BASE)を応用した建設現場で自律移動可能な資材搬送装置の開発を目指した共同研究契約を締結した。
今回、建設業界における人手不足の課題解決や重労働作業のロボットへ代替、生産性向上目的に、全方向移動ロボット(TriOrb BASE)を応用した建設現場で自律移動可能な資材搬送装置の開発を目指した共同研究契約を締結した。
建設現場での走行ロボットの開発に際して、これまで倉庫等で活躍するAMR(無人搬送台車)の転用が多く試みられてきたが、建設現場特有の課題である荒れた走行路面、日々変化する環境、多数の資材が配置されたなかで求められる効率的な移動等、所望の性能を実現することは困難だった。
TriOrb BASEはこれらの課題を克服できるポテンシャルがあり、既存のAMRの転用ではなく、建設現場においても安定した走行性能の実現を目指し、自律移動型の資材搬送装置の研究開発に着手することにしたという。今後、TriOrbと戸田建設は建設業界での技術・知見・リソースを組み合わせ、更なる発展を目指す。
TriOrb BASEは従来の全方向移動機構に比べコンパクトさを有しながら高い走破性や移動性能を持つため、建設現場などの荒れた床面や狭い場所での活用、精緻な移動が必要な場面での活躍が期待されている。また、メンテナンスの簡易性も大きな特徴。
関連URL
関連記事





注目記事
-
2026-3-11
日本経営協会、生成AIの業務活用2位は「文章校正」1位は?
日本経営協会は、2025年9月10日~9月18日の期間、企業・団体に勤務するビジネスパーソン729名… -

2026-3-11
アイスマイリー、物流・交通・運輸向けAIサービスカオスマップ公開
AIポータルメディア「AIsmiley」を運営するアイスマイリーは10日、現場の課題に応じた最適解を… -

2024-9-19
小学校の授業における生成AIの活用と文科省ガイドライン
小学校の授業における生成AIの活用は、教育の質を向上させる新たな可能性を秘めている。生成AIを活用す… -

2024-8-19
生成AIの種類(ChatGPT, Gemini, Copilot)・特徴と使い方
生成AI(生成型人工知能)は、テキスト、画像、音声などのコンテンツを自動で生成する技術。日本国内でも… -
2023-8-21
総社市スマホ市役所、生成AIを用いた対話応答型サービスを開始
岡山県総社市とBot Expressは18日、7月に開設した総社市スマホ市役所で、生成AIを用いた対…