JAXAと研究開発したAIロボットシステムが100%の精度で曲線も含む柔軟物のファスナーの開閉作業を実現
エクサウィザーズは、宇宙航空研究開発機構(JAXA)と共同で実施している、有人宇宙拠点内クルー作業の自動化・自律化に向けた技術検討の取り組みにおいて、さまざまな用途に合わせて学習できる汎用性の高い模倣学習プラットフォームを開発。同プラットフォームを活用し、物資輸送用バッグのファスナー開閉等、従来の技術ではロボットによる自律操作が困難だった作業を、対象物の位置を固定した環境下において100%の精度で実現可能なAIロボットシステムを構築したことを23日発表した。
現在、国際宇宙ステーション(ISS)では宇宙飛行士による船外作業のリスク低減や、作業の効率化に寄与する船外ロボットアームが活躍している。将来的にロボットによる作業の補助の幅を更に広げ、船内でも宇宙飛行士をサポートするためには、人の手による取り扱いを前提とした柔軟な素材の操作が必要となる。
しかし、従来のロボット技術では物資輸送用バッグ (Cargo Transfer Bag:CTB)やケーブル類といった形状が変化する対象を通信の遅延がある環境で操作することは困難であるほか、操作対象のサイズや質量が作業の精度に影響を与えやすいという課題がった。
今回同社は上記のような課題の解決に向け、マルチモーダルデータを活用して工程の自動化・最適化を可能にするロボットAIソリューション「exaBase ロボティクス」の技術アセットを活用することで、さまざまな用途に合わせて学習できる汎用性の高い模倣学習プラットフォームを開発した。そして、同プラットフォームを活用して構築したAIロボットシステムにより、従来のロボットでは自律操作が困難だったCTBのファスナー開閉等を対象に、適用性の評価および実機におけるデモンストレーションを実施した。
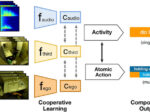
ロボットが柔軟物のファスナーを開閉する作業は高度な模倣学習・予想学習技術を必要とするため、従来の技術では実現することが困難だった。しかし、同社顧問で早稲田大学理工学術院基幹理工学部表現工学科の尾形哲也教授の論文により、視覚と触覚の情報を併用することで、対象物の位置を固定した状況下において直線上のファスナーを開ける作業が約93%の精度で可能となることが発表された。
本取り組みでは、同論文で使用されたモデルアーキテクチャーをもとに開発を行い、AIロボットによる柔軟物のファスナー開閉作業を、以下の3点においてより実用性の高いレベルで実現した。
(1)触覚に代わり力覚(関節モータ電流から推定したトルク値)を用いて、柔軟物におけるファスナーの開閉作業を実現
(2)直線だけでなく曲線も含む柔軟物のファスナー開閉作業を、対象物の位置を固定した状況下において学習させ、その固定位置における操作を100%の精度で実現
(3)上記条件に加え対象物の位置を左右にずらして学習させ、その後、学習条件とは違う位置に動かした条件下においても、曲線を含むファスナー開閉作業を80%以上の精度で実現
今後は、同作業の宇宙での適用に向けて、対象物の場所や形だけでなく、重力環境が変化する状況下においてもさらに高い精度で作業が実施できるよう、開発を進める予定だという。
関連URL
関連記事



注目記事
-
2026-3-11
日本経営協会、生成AIの業務活用2位は「文章校正」1位は?
日本経営協会は、2025年9月10日~9月18日の期間、企業・団体に勤務するビジネスパーソン729名… -

2026-3-11
アイスマイリー、物流・交通・運輸向けAIサービスカオスマップ公開
AIポータルメディア「AIsmiley」を運営するアイスマイリーは10日、現場の課題に応じた最適解を… -

2024-9-19
小学校の授業における生成AIの活用と文科省ガイドライン
小学校の授業における生成AIの活用は、教育の質を向上させる新たな可能性を秘めている。生成AIを活用す… -

2024-8-19
生成AIの種類(ChatGPT, Gemini, Copilot)・特徴と使い方
生成AI(生成型人工知能)は、テキスト、画像、音声などのコンテンツを自動で生成する技術。日本国内でも… -
2023-8-21
総社市スマホ市役所、生成AIを用いた対話応答型サービスを開始
岡山県総社市とBot Expressは18日、7月に開設した総社市スマホ市役所で、生成AIを用いた対…