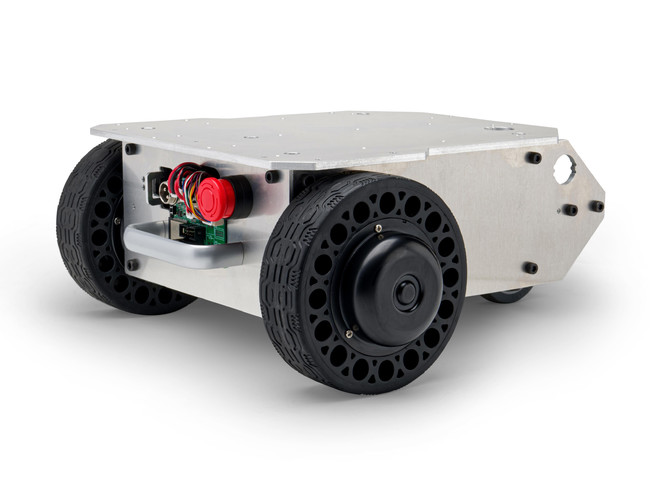
ヴイストンは13日、ダイレクトドライブのインホイールモーターを採用し、旧来のモデルから大幅な静音化を実現した、可搬重量約40kgの研究開発用台車ロボット「メガローバーVer.3.0」を発売すると発表した。
メガローバーVer.3.0は、同社製研究開発用台車ロボットの中核モデルである「メガローバーVer2.1」の後継機。可搬重量約40kgの大型筐体、追加工やカスタマイズを行いやすいアルミニウムの筐体、ソフトウェア開発を容易なものとするArduino IDE対応、柔軟で高度な制御を実現するROS1対応といった数多くの特徴をそのまま継承し、さらに、駆動輪にダイレクトドライブタイプのインホイールモーターを採用することにより、旧来のモデルと比較して約20dBの大幅な静音化を実現した。これにより、様々な自動運搬・自動搬送シーンで求められている高度な機能や耐久性を十分に満たしつつ、音声認識などを伴うような高い静粛性が求められる用途にも適した製品となっているという。
本製品の開発においては、ヴイストンにおけるコミュニケーションロボットや各種のエージェントシステムの開発経験をフィードバックし、仕様策定を行っている。メガローバーVer.3.0は、単純な物流・運搬の自動化やオートメーション化にとどまらず、それらさらに一歩進めた、よりユーザーフレンドリーでインテリジェントなシステムを構築することに貢献する。
大型の研究開発用台車ロボットにおいては、旧モデルであるメガローバーVer2.1の動作音でも特別な支障があるというものではなかった。しかし、台車ロボットに搭載する機器において音声認識や音声発話を実行する際などには、可能な限りその動作音が小さいことが望まれる。
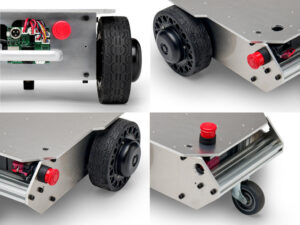
そのため、今回発売するメガローバーVer.3.0においては、駆動輪に新たにインホイールモーターを採用。これにより、メガローバーVer2.1と比較し、同社実験値にて約20dB(可聴域において)の動作音低減効果が得られている。
実際の聴感上の動作音については、動作させる環境や路面状況、積載状況、動作プログラムにより大きく異なるが、同社での社内検証においては、「メガローバーVer.3.0が近づいてきても気付かない」ほどの静音性が実現されているという。
 メガローバーVer.3.0はROS(ROS1)メッセージ通信に対応しており、ROSが動作するデバイスとWi-FiまたはUSBケーブルで接続することで、rosserialのパッケージを用いたROS1のメッセージ通信が可能。
メガローバーVer.3.0はROS(ROS1)メッセージ通信に対応しており、ROSが動作するデバイスとWi-FiまたはUSBケーブルで接続することで、rosserialのパッケージを用いたROS1のメッセージ通信が可能。
標準ファームウェアでは、geometry_msgs/Twist型を使って、ROSからメガローバーに対して移動速度指令値を送信したり、メガローバーから現在速度やバッテリー電圧を取得したりすることが可能。また、ユーザーの手によってファームウェアを変更することで、上記の他にも任意のメッセージを送受信することが可能。なお、ROSを動作させるデバイスは別途用意が必要。
メガローバーVer.3.0は、旧製品と同様に数多くのオプション品に対応している。用途に合わせたセンサーや構成部品を追加することが可能で、多様な研究・開発分野にて、大型の研究開発用台車ロボットの可搬性や走行能力を存分に活用することができる。
関連URL
関連記事





注目記事
-
2026-3-11
日本経営協会、生成AIの業務活用2位は「文章校正」1位は?
日本経営協会は、2025年9月10日~9月18日の期間、企業・団体に勤務するビジネスパーソン729名… -

2026-3-11
アイスマイリー、物流・交通・運輸向けAIサービスカオスマップ公開
AIポータルメディア「AIsmiley」を運営するアイスマイリーは10日、現場の課題に応じた最適解を… -

2024-9-19
小学校の授業における生成AIの活用と文科省ガイドライン
小学校の授業における生成AIの活用は、教育の質を向上させる新たな可能性を秘めている。生成AIを活用す… -

2024-8-19
生成AIの種類(ChatGPT, Gemini, Copilot)・特徴と使い方
生成AI(生成型人工知能)は、テキスト、画像、音声などのコンテンツを自動で生成する技術。日本国内でも… -
2023-8-21
総社市スマホ市役所、生成AIを用いた対話応答型サービスを開始
岡山県総社市とBot Expressは18日、7月に開設した総社市スマホ市役所で、生成AIを用いた対…