
人間共存ロボットの実現を目指す東京ロボティクスは18日、NTTコミュニケーションズとの共同開発の成果として、ネットワークを介して人型ロボットを力制御(バイラテラル制御)するデモ動画を公開した。
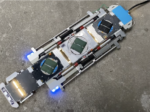
本動画では、関節トルクセンサと手先力覚センサを備えたロボットアームを用いたリーダー装置と、腕部と腰部にトルクセンサを搭載した人型ロボットを用いてバイラテラル制御を実現している。大きな力が出せるロボットにおいて安定したバイラテラル制御を実現するためには、剛性の高いハードウェアとセンシティブなフォース・トルクセンサ、高速かつリアルタイムなモータ間同期、および高速かつ低ジッタのネットワーク環境が必要。
同社は2019年からNTTコミュニケーションズのオープンイノベーションプログラムに採択されて以来、同社と共同で遠隔操作ロボット(テレプレゼンスロボット)を開発してきた経緯があり、今回の発表は昨年4月のリリースを補足する技術公開になるという。
バイラテラル制御は遠隔操作技術の手法の一つで、操縦者がリーダー装置を動かすことで、フォロワー装置(人型ロボット)を遠隔から操作することができる。リーダー装置から一方的に位置指令を出すだけでなく、フォロワー装置が感じた外力をリーダー装置を経由して操縦者にフォードバックすることができるため、対象物と接触するような作業も位置制御ベースの遠隔操作技術に比べて容易に行うことができる。
今後は、災害救助、危険地作業、遠隔医療、遠隔就労、障がい者の社会参加等のアプリケーションの実現に向け、引き続きロボットの品質向上と安定したマルチモーダル情報伝送(視覚、聴覚、力覚のネットワーク伝送)の研究開発を進めていくという。
関連URL
関連記事


注目記事
-
2026-3-11
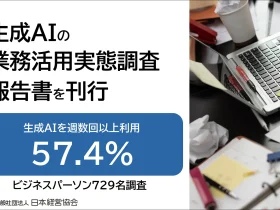
日本経営協会、生成AIの業務活用2位は「文章校正」1位は?
日本経営協会は、2025年9月10日~9月18日の期間、企業・団体に勤務するビジネスパーソン729名… -

2026-3-11
アイスマイリー、物流・交通・運輸向けAIサービスカオスマップ公開
AIポータルメディア「AIsmiley」を運営するアイスマイリーは10日、現場の課題に応じた最適解を… -

2024-9-19
小学校の授業における生成AIの活用と文科省ガイドライン
小学校の授業における生成AIの活用は、教育の質を向上させる新たな可能性を秘めている。生成AIを活用す… -

2024-8-19
生成AIの種類(ChatGPT, Gemini, Copilot)・特徴と使い方
生成AI(生成型人工知能)は、テキスト、画像、音声などのコンテンツを自動で生成する技術。日本国内でも… -
2023-8-21
総社市スマホ市役所、生成AIを用いた対話応答型サービスを開始
岡山県総社市とBot Expressは18日、7月に開設した総社市スマホ市役所で、生成AIを用いた対…