タカラトミー、変形型月面ロボットLEV-2(愛称「SORA」)が月面へ向けて出発

タカラトミーは7日、同社が宇宙航空研究開発機構(JAXA)、ソニーグループ、同志社大学と共同開発した超小型の変形型月面ロボット「LEV-2(レブツー)愛称:SORA-Q(ソラキュー)」は、JAXAの小型月着陸実証機「SLIM(スリム)」に搭載され、H-IIAロケット47号機(H-IIA・F47)により、種子島宇宙センターから2023年9月7日8時42分11秒(日本標準時)に打上げられたと発表した。
ロケットは計画通り飛行し、 SLIM は約47分33秒後にロケットから正常に分離された事が確認された。(参照元: JAXA プレスリリース JAXA | X線分光撮像衛星(XRISM)及び小型月着陸実証機(SLIM)の打上げ結果について )今後「 SORA-Q 」は数カ月かけて着月を目指すこととなり、月面で走行する日本最初のロボットになる可能性がある。

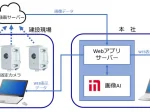
変形型月面ロボット「SORA-Q」 (左)変形前 (右)変形後
クレジット:JAXA/タカラトミー/ソニーグループ/同志社大学
「SORA-Q」は月面低重力環境下における超小型ロボットの探査技術の実証を目的とし、JAXAの宇宙探査イノベーションハブとして初めて月面での実証を行うもの。 SLIMの月着陸直前に、もう一台のロボット「LEV-1」とともに放出される。搭載されたカメラを利用して写真撮影をするとともに、月面走行時のデータを取得する。その後、「LEV-1」を経由して、写真や走行データを地球へと送信する。
タカラトミーは来年2024年2月2日に創業100年を迎える。創業以来、守り続けてきたおもちゃ作りの原点である、安心・安全な品質と細部にまでこだわる職人魂、柔軟な発想力、そしてなによりも子どもたちを笑顔にしたいという強い想いが今回の宇宙探査に活かされることで、子どもたちがこれまで以上に自然科学領域に興味を持ち、宇宙の面白さを知ってもらうきっかけとなってくれることを心から願っているという。
変形型月面ロボット「SORA-Q」
質量:本体約250g、サイズ:直径約80mm(変形前)
通信:LEV-1とLEV-2(SORA-Q)間の通信機能
カメラ:前後2つのカメラでSLIM着陸機及び周辺環境を撮像可能
関連URL
関連記事




注目記事
-
2026-3-11
日本経営協会、生成AIの業務活用2位は「文章校正」1位は?
日本経営協会は、2025年9月10日~9月18日の期間、企業・団体に勤務するビジネスパーソン729名… -

2026-3-11
アイスマイリー、物流・交通・運輸向けAIサービスカオスマップ公開
AIポータルメディア「AIsmiley」を運営するアイスマイリーは10日、現場の課題に応じた最適解を… -

2024-9-19
小学校の授業における生成AIの活用と文科省ガイドライン
小学校の授業における生成AIの活用は、教育の質を向上させる新たな可能性を秘めている。生成AIを活用す… -

2024-8-19
生成AIの種類(ChatGPT, Gemini, Copilot)・特徴と使い方
生成AI(生成型人工知能)は、テキスト、画像、音声などのコンテンツを自動で生成する技術。日本国内でも… -
2023-8-21
総社市スマホ市役所、生成AIを用いた対話応答型サービスを開始
岡山県総社市とBot Expressは18日、7月に開設した総社市スマホ市役所で、生成AIを用いた対…