オカムラ、物流ピッキングロボット遠隔操作時の力覚フィードバック効果の調査研究実施
- 2023/11/28
- フィールド
- ハイブリッド型ロボット, 力覚フィードバック効果, 物流ピッキングロボット, 物流自動化ソリューション, 遠隔操作

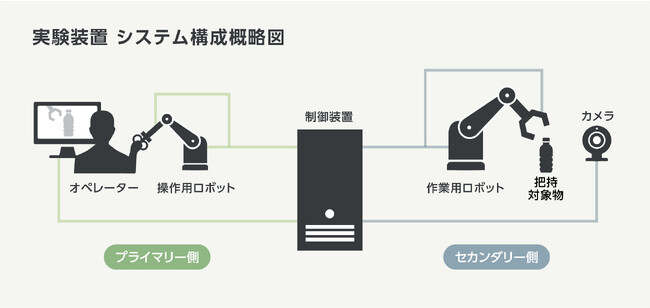
オカムラは27日、自律・遠隔操作ハイブリッド型ロボットによる物流自動化ソリューション「PROGRESS ONE(プログレスワン)」の事業化に向けた取り組みの一環として、物流ピッキングロボットの遠隔操作時の力覚フィードバック効果の調査研究を実施したと発表した。
この研究は「サイズや出力が異なるロボットの遠隔操作時の力覚フィードバック効果の先導調査研究」としてモーションリブと共同で実施した。
遠隔操作ロボットシステムにおいて、オペレーターが遠隔地から物流現場にあるロボットでピッキング作業を行う際に、操作画面による視覚的な判断だけでは、遠隔での把持(しっかりものをつかむ)操作が困難であることが課題となっていた。「プログレスワン」の事業化を進めるにあたり、視覚に加え、力覚フィードバックで操作性を高める開発・研究が必要だった。
本研究は、ピッキングなどの物流施設内作業を想定した遠隔操作ロボットシステムにおいて、オペレーターが遠隔地からディスプレイを見ながら作業を行う際に、複雑な動作になるほどロボットが物体と接触した時の引っ張られる・押されるなどの力覚情報を人に知覚させる力覚フィードバックの重要性を実証するとともに課題を検討した。
実験結果から、力覚フィードバックが遠隔での把持操作や緩衝材の押し込みを効率的に行うために必要不可欠な機能であること、オペレーションの熟練者と初心者ではそれぞれ必要とする補助機能が異なることなどが明らかになった。
この研究は、新エネルギー・産業技術総合開発機構(NEDO)が昨年22年度に公募したプロジェクト「ロボットによる社会変革推進に向けたロボット・AI部事業の周辺技術・関連課題に係る先導調査研究」として採択された。また、「第41回日本ロボット学会学術講演会(RSJ2023)」のオープンフォーラム(2023年9月11日開催)で講演を行った。
□実験の様子動画(YouTube)
関連URL
関連記事




注目記事
-
2026-3-11
日本経営協会、生成AIの業務活用2位は「文章校正」1位は?
日本経営協会は、2025年9月10日~9月18日の期間、企業・団体に勤務するビジネスパーソン729名… -

2026-3-11
アイスマイリー、物流・交通・運輸向けAIサービスカオスマップ公開
AIポータルメディア「AIsmiley」を運営するアイスマイリーは10日、現場の課題に応じた最適解を… -

2024-9-19
小学校の授業における生成AIの活用と文科省ガイドライン
小学校の授業における生成AIの活用は、教育の質を向上させる新たな可能性を秘めている。生成AIを活用す… -

2024-8-19
生成AIの種類(ChatGPT, Gemini, Copilot)・特徴と使い方
生成AI(生成型人工知能)は、テキスト、画像、音声などのコンテンツを自動で生成する技術。日本国内でも… -
2023-8-21
総社市スマホ市役所、生成AIを用いた対話応答型サービスを開始
岡山県総社市とBot Expressは18日、7月に開設した総社市スマホ市役所で、生成AIを用いた対…