
最先端のAI・ロボティクスの技術を活用したソリューション提供を行うTRUST SMITHは15日、ロボットが物体を掴む上で最適な位置を検出するアルゴリズムを実用化したと発表した。
本技術により、モデルレスでのピッキングタスクを実現し、工場における労働力不足の解消や作業効率の向上を目指すという。
産業用ロボットの重要なタスクとして物体を正確に掴むことが挙げられる。このピッキングタスクを実現するためには、ロボットに搭載されているカメラセンサを用いて、物体の画像を撮影し、その物体の最適な把持位置を検出する必要がある。
近年はDeep Learningを用いた物体の把持位置を検出する方法に注目が高まっており、その手法は把持位置を高精度に検出できるが、莫大な学習データ量・学習時間が必要であることが問題だった。
そこでTRUST SMITHは、ロボットが物体を掴む上で最適な位置を検出するアルゴリズムを開発・実用化した。本技術により、学習データに含まれない物体の把持位置も高精度に検出するという。
本技術は、深度カメラにより取得した対象の画像に対して、各位置・各角度でロボットアームのハンドを挿入した時に物体を把持できる可能性を評価し、その可能性が最も高い把持方法を探索するアルゴリズム。
モデルレス物体認識アルゴリズム 特徴
①学習データに含まれない未知の物体の把持位置を高精度に検出可能
教師データなしで把持位置の検出をすることが可能なため、学習モデルを構築する必要がない。これにより、学習させていない物体は把持できない、という事態を回避できる。
②把持に不適切な対象物の除去
把持に適した位置、そうでない位置を定義することによって、把持に不適切な物体の除去が可能。加えて、把持可能な物体の中でも把持が難しい把持位置を除去することが可能となるため空掴みといった事象も減らすことが可能。
 今後は、本アルゴリズムを用いた物体認識と、同社が得意としているアームロボットの経路生成アルゴリズムを組み合わせ、バラ積みピッキングをはじめとした工場内のピッキングシステムを開発していく予定。
今後は、本アルゴリズムを用いた物体認識と、同社が得意としているアームロボットの経路生成アルゴリズムを組み合わせ、バラ積みピッキングをはじめとした工場内のピッキングシステムを開発していく予定。
加えて、同社が得意とする量子化技術やFPGAなどの技術によりアルゴリズムの高速化を狙う。物体認識技術の高度化による高精度化も進め、より高速かつ高精度なピッキングシステムを提供する。それによりあらゆる工場内の更なる自動化を進めていくとしている。
関連URL
関連記事





注目記事
-
2026-3-11
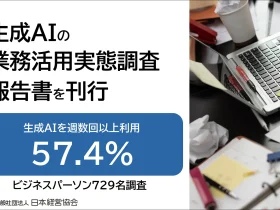
日本経営協会、生成AIの業務活用2位は「文章校正」1位は?
日本経営協会は、2025年9月10日~9月18日の期間、企業・団体に勤務するビジネスパーソン729名… -

2026-3-11
アイスマイリー、物流・交通・運輸向けAIサービスカオスマップ公開
AIポータルメディア「AIsmiley」を運営するアイスマイリーは10日、現場の課題に応じた最適解を… -

2024-9-19
小学校の授業における生成AIの活用と文科省ガイドライン
小学校の授業における生成AIの活用は、教育の質を向上させる新たな可能性を秘めている。生成AIを活用す… -

2024-8-19
生成AIの種類(ChatGPT, Gemini, Copilot)・特徴と使い方
生成AI(生成型人工知能)は、テキスト、画像、音声などのコンテンツを自動で生成する技術。日本国内でも… -
2023-8-21
総社市スマホ市役所、生成AIを用いた対話応答型サービスを開始
岡山県総社市とBot Expressは18日、7月に開設した総社市スマホ市役所で、生成AIを用いた対…