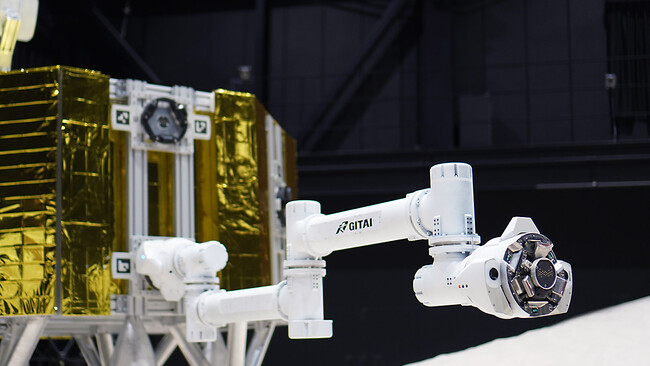
宇宙用汎用作業ロボットを開発するGITAI Japan(GITAI)は17日、稼働爪を持つ「グラップルエンドエフェクタ」をアームの両端に搭載した”シャクトリ虫” 型ロボットアーム GITAI IN1 (Inchworm One) を開発したと発表した。
GITAI IN1 は、その柔軟な接続機能により、様々なツールと接続して用途の異なる複数の作業が可能な「タスク性能」、ローバーや人工衛星などの移動体と接続して広範囲に仕事を行うことが可能な「移動性能」を同時に実現している。今回、すでに発表済みの月面作業用ロボットローバー GITAI R1と協調して、JAXA相模原の模擬月面環境でNASAの技術成熟度レベル(Technology readiness levels、 TRL)におけるレベル 3 に対応する各種試験を実施し、成功した。その実証動画を公開する。
■模擬月面環境での実証実験について
本地上実証実験は、今後月面探査や月面基地建設で必要となるであろう作業を、シャクトリ虫型ロボットアーム GITAI IN1 と、すでに発表済みの月面作業用ロボットローバー GITAI R1 の2台を使って実現するもの。具体的には、JAXA相模原の模擬月面環境で以下の2つの観点から試験を行い、全ての試験に成功した。
1.「移動性能」検証試験
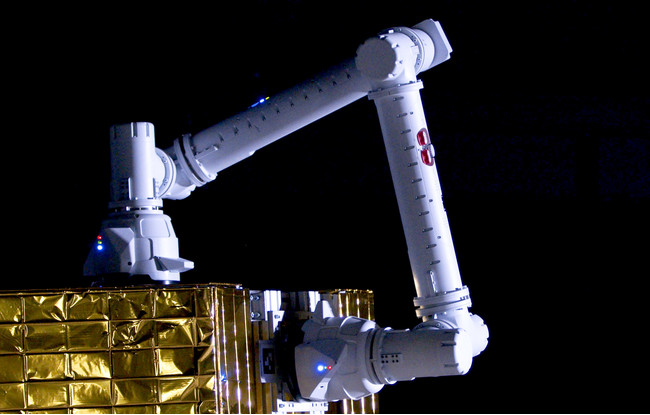
ロボットアームGITAI IN1 自身が自律移動して月面着陸機からローバーに乗り移り、作業地点まで移動して所定の作業を行った後、再び月面着陸機に戻る「移動性能」の検証を行った。
2.「タスク性能」検証試験
月面資源採取作業を想定し、切削工具を使った資源サンプルの破壊、シャベルを使った資源サンプルの回収、牽引車を使った資源サンプルの運搬など、一連の作業を複数のツールを使い分けながら実現する「タスク性能」の検証を行った。
 国際宇宙ステーション(ISS)の老朽化に伴い、民間による宇宙ステーションの建設が複数発表されている。また、月面への有人宇宙飛行、さらにはその先の月面基地建設に関しても、複数の具体的なプロジェクトが着実に進行している。このように、宇宙における開発作業が本格化する中、宇宙環境下でロボットに求められる作業内容は多様化・複雑化している。GITAI はこのようなニーズに応えるために、複数の仕事を実施することが可能な「タスク性能」、広範囲に仕事を行うことが可能な「移動性能」の二つの課題を解決可能な自律ロボットアームGITAI IN1 を開発した。
国際宇宙ステーション(ISS)の老朽化に伴い、民間による宇宙ステーションの建設が複数発表されている。また、月面への有人宇宙飛行、さらにはその先の月面基地建設に関しても、複数の具体的なプロジェクトが着実に進行している。このように、宇宙における開発作業が本格化する中、宇宙環境下でロボットに求められる作業内容は多様化・複雑化している。GITAI はこのようなニーズに応えるために、複数の仕事を実施することが可能な「タスク性能」、広範囲に仕事を行うことが可能な「移動性能」の二つの課題を解決可能な自律ロボットアームGITAI IN1 を開発した。
GITAI IN1 は、アームの両端に「グラップルエンドエフェクタ」を搭載している。「グラップルエンドエフェクタ」は、その嵌合相手となる「グラップルフィクスチャ」とともに、ロボットアームの手先を交換(着脱)可能にするためのインターフェース。グラップルエンドエフェクタは、グラップルフィクスチャと嵌合した際に機械結合、電力結合、通信結合の機能を備え、エンドエフェクタ・ツールなどを操作することが可能になる。
グラップルエンドエフェクタにより、1台のロボットアームに対し様々なエンドエフェクタやツールを切り替えることで、複数の仕事を実施することが可能な「タスク性能」を実現している。
また、GITAI IN1 は、人工衛星やローバーなどの移動体壁面に設置されたグラップルフィクスチャと嵌合することで、移動体上を自由に移動することが可能。さらに、グラップルフィクスチャを建造物などに設置することでロボットアームの移動範囲を上下左右と無限に広げることも可能となる。グラップルフィクスチャに充電機能を備えることで、ロボットアーム自身が移動しながら充電することも可能。これにより、GITAI IN1は広範囲にて仕事を行うことが可能な「移動性能」を実現している。
今後GITAIは、すでに発表済みのGITAI S2 やGITAI S10 と同様、GITAI IN1 においてもTRL 6(地上でのシステムとしての技術成立性の確認)、TRL 7(宇宙空間でのシステムとしての技術成立性の確認)の早期の達成を目指して、開発を加速していくという。
関連URL
関連記事




注目記事
-
2026-3-11
日本経営協会、生成AIの業務活用2位は「文章校正」1位は?
日本経営協会は、2025年9月10日~9月18日の期間、企業・団体に勤務するビジネスパーソン729名… -

2026-3-11
アイスマイリー、物流・交通・運輸向けAIサービスカオスマップ公開
AIポータルメディア「AIsmiley」を運営するアイスマイリーは10日、現場の課題に応じた最適解を… -

2024-9-19
小学校の授業における生成AIの活用と文科省ガイドライン
小学校の授業における生成AIの活用は、教育の質を向上させる新たな可能性を秘めている。生成AIを活用す… -

2024-8-19
生成AIの種類(ChatGPT, Gemini, Copilot)・特徴と使い方
生成AI(生成型人工知能)は、テキスト、画像、音声などのコンテンツを自動で生成する技術。日本国内でも… -
2023-8-21
総社市スマホ市役所、生成AIを用いた対話応答型サービスを開始
岡山県総社市とBot Expressは18日、7月に開設した総社市スマホ市役所で、生成AIを用いた対…